#include <pid.h>
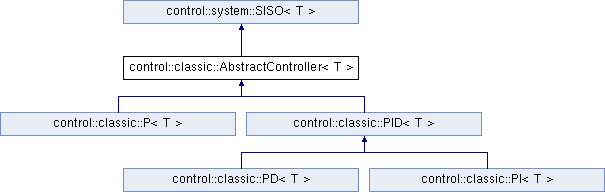
Inheritance diagram for control::classic::AbstractController< T >:
Public Member Functions | |
| AbstractController (T Limit_=max< T >()) | |
| T | step (T e) final |
| void | setLimit (T limit) |
| virtual void | reset () |
Public Attributes | |
| T | Limit |
| bool | clipping = false |
Protected Member Functions | |
| T | clip (T u) |
| virtual T | control (T e)=0 |
Detailed Description
template<typename T>
class control::classic::AbstractController< T >
Base controller that implements limiting, resetting and stepping
- Template Parameters
-
T
Constructor & Destructor Documentation
◆ AbstractController()
template<typename T >
|
inlineexplicit |
Constructor
- Parameters
-
Limit_ maximum value of the output signal
Member Function Documentation
◆ clip()
template<typename T >
|
inlineprotected |
Limit the output
- Parameters
-
T u
- Returns
- T
◆ control()
template<typename T >
|
protectedpure virtual |
Retrieves the control output, unclipped
- Parameters
-
T e the error
- Returns
- T the raw output
Implemented in control::classic::PID< T >, and control::classic::P< T >.
◆ reset()
template<typename T >
|
inlinevirtual |
Reset the state of the controller
Reimplemented in control::classic::PID< T >.
◆ setLimit()
template<typename T >
|
inline |
Update the output limit
- Parameters
-
T limit
◆ step()
template<typename T >
|
inlinefinalvirtual |
Steps the controller one time-step
- Parameters
-
T e the error value
- Returns
- T the controller output
Implements control::system::SISO< T >.
The documentation for this class was generated from the following file:
- include/control/classic/pid.h
